
IAM - 22523 Unit - 1 Mcq On 3 Phase Induction Motor Industrial Ac Machines

Q. The frame of an induction motor is usually made of
1. Silicon steel
2. Cast iron
3. Aluminum
4. Bronze
Answer 2. Cast Iron
Explanation:
∙ The frame provides the structural support for all other motor components.
∙ The frame must be made up of the rigid material that can absorb vibration as well as noise in the induction motor.
∙ The frame of the induction motor is made either of welded sheet steel or fabricated steel, cast iron or cast aluminum alloy. ∙ The material is selected based on cost, heat transfer characteristics and manufacturing capability considering the size of the machine. ∙ The frame of small AC induction motor is made up of cast iron but the frame of medium size induction motor is made up of welded sheet steel.
Q. A 3-phase 440 V, 50 Hz induction motor has 4% slip. The frequency of rotor current will be
1. 50 Hz
2. 25 Hz
3. 5 Hz
4. 2 Hz
Answer 4. 2 Hz
Explanation:
∙ Frequency of the rotor current is given as
fr = sf
fr= 0.4 x 50 = 2 Hz
Q. The starting torque of a squirrel-cage induction motor is
1. Full-load torque
2. Slightly more than full-load torque
3. Low
4. Negligible
Answer 3. Low
Explanation:
∙ Starting torque is directly proportional to the rotor resistance of an induction motor.
∙ The resistance of squirrel-cage induction motor can not be varied as compared to the slip ring induction motor.
∙ In the squirrel-cage induction motor, the rotor has very low fixed resistance, therefore, the starting torque is low due to low power factor and high reactance.
∙ The starting torque could be increased by increasing starting resistance but due to high current in the rotor during starting will increase the copper loss which will decrease the motor efficiency.
Q. The efficiency of an induction motor is about
1. 100%
2. 80-90%
3. 50-60%
4. Less than 50%
Answer 2. 80-90%
Explanation:
∙ Induction motors are often compared to Transformers because both the machines work under the principle of “mutual induction”. An induction motor is also called as rotating transformer with secondary winding short-circuited.
∙ As we know that the transformer’s efficiency is greater than 95%. ∙ An Induction motor includes friction and windage(i.e., mechanical losses) losses addition to the no load and copper losses, hence efficiency comes down to 80% to 90%.
Q. A double squirrel-cage induction motor has
1. Two series winding in stator
2. Two parallel windings in stator
3. Two parallel winding in Rotor
4. Two rotors moving in opposite direction
Answer 3. Two parallel winding in Rotor
Explanation:
∙ In squirrel cage motor there is no provision made for adding external resistance because the end rings are permanently shorted with the rotor conductor, therefore, the starting torque of squirrel cage induction motor is very poor due to low rotor resistance.
∙ The starting torque could be increased by increasing starting resistance but due to high current in the rotor during starting will increase the copper loss which will decrease the motor efficiency.
∙ As the name suggests the double squirrel-cage induction motor has two sets of parallel squirrel-cage winding in the same rotor.
∙ The outer cage bar have smaller cross-section area as compared to inner cage bar
∙ The outer cage bar is made up of high resistive material such as aluminum, brass etc.
∙ The outer cage has less leakage flux linkage because of their relatively open slots hence it has lower reactance.
∙ The Lower cage bar has high cross-section area and it is made up of low resistance material like copper.
∙ The upper and lower cage bar is separated by narrow slit or construction.
∙ The inner cage has high leakage flux linkage due to the presence of slit hence it has high self-inductance.
∙ Therefore during starting period, it gave high resistance means high starting torque whereas it gives low resistance during running condition.
Q. A 50 Hz, 3-phase induction motor has a full load speed of 1440 r.p.m. The number of poles in the motor is
1. 2 pole
2. 4 pole
3. 6 pole
4. 8 pole
Answer 2. 4 pole
Explanation:
P = 120f/N
= 120 x 50/ 1400
= 4.28
The number of poles should be even and the whole number. Therefore the number of poles must be 4.
Q. The auto-starters (using three autotransformers) can be used to start cage induction motor of the following type
1. Delta connected only
2. Star connected only
3. Both 1 and 2
4. None of the above
Answer 3. Both 1 and 2
Explanation:
Auto-transformer starting of an Induction Motor. ∙ The auto-transformer starting method is also known as the reduced voltage reactor method.
∙ The auto-transformer method reduces the initial voltage applied to the motor and therefore the starting current and torque also get reduced. ∙ The motor can be connected permanently in delta or in the star, is switched first on the reduced voltage from a 3-phase tapped auto transformer and when it has accelerated sufficiently, it is switched to the running (full voltage) position.
∙ The principle is similar to star/delta starting and has similar limitations. ∙ The advantage of this method is that the current and torque can be adjusted to the required value, by taking the correct tapping on the autotransformer.
∙ This method is more expensive because of the additional autotransformer.
Q. If any two phases for an induction motor are interchanged 1. The motor will run in the reverse direction
2. The motor will continue to run in the same direction
3. The motor will stop
4. The motor will Burn
Answer 1. The motor will run in the reverse direction
Explanation:
∙ If we interchange any two phases, you can reverse the motor running direction. i.e. say R-Y-B motor running clockwise, change to R-B Y, the motor will rotate counter-clockwise.
∙ However, the motor should be stopped before phase interchange is done. If it is done during running conditions, a braking torque will be produced before the change in direction of the supply is prolonged.
Q. An induction Motor is
1. Self-starting with high torque
2. Self-starting with zero torque
3. Self-starting with low torque
4. Not self-starting
Answer 3. Self-starting with low torque
Explanation:
Why is an induction motor self-starting?
∙ 3 phase induction motor is self-starting because it consists of cage windings of parallel conductors (made up of copper or aluminum) short circuited at the ends by end rings, hence forming a closed path for current flow.
∙ And for SLIP RING induction motor the ends of the rotor windings are externally connected by a variable rheostat (resistance is varied in order to give it proper starting and running current).
∙ So when 3 phase ac supply is given to the stator windings of the induction motor, RMF (revolving magnetic field ) is produced, that links with the conductor of cage rotor and produces emf, so a current start flowing through the conductors, hence torque is developed which causes the rotor to rotate.
Q. In three-phase squirrel-cage induction motors
1. Rotor conductors are kept open
2. Rotor conductor ends are short-circuited through slip rings 3. Rotor conductors are short-circuited through end rings
4. Rotor conductors are connected to the insulation
Answer 3. Rotor conductors are short-circuited through end rings Explanation:
∙ When 3 phase supply is given to the stator of a 3 phase induction motor, rotating stator flux will be produced, which will induce emf in the rotor windings, according to Faraday’s law of electromagnetic induction.
∙ Now if the rotor windings are kept open-circuited, no current will flow in these windings. The question is why we need rotor currents? ∙ This is because to run the motor and produce torque from it. The magnitude of torque produced depends on the product of stator flux and current in the rotor coils.
∙ Due to short-circuited rotor windings, short circuit rotor currents will flow in them, giving rise to their own magnetic field linking with the stator flux. And here we get a running motor.
Q . In a three-phase induction motor, the number of poles in the rotor winding is always
1. Equal to the number of poles in the stator
2. Zero
3. More than the number of poles in the stator
4. Less than the number of poles in the stator
Answer 1. Equal to the number of poles in the stator
Explanation:
∙ If the motor is squirrel cage induction motor, the number of rotor poles automatically gets adjusted to the number of stator poles ∙ But if the motor is wound rotor induction motor and number of poles on rotor and stator don’t match then the resultant torque will be zero. And the motor will not run.
Q . Which of the following motor has high starting torque?
1. Slip ring Induction motor
2. Squirrel cage induction motor
3. Both 1 & 2
4. None of the above
Answer 1. Slip Ring induction motor
Explanation:
∙ In SLIP RING induction motor the ends of the rotor windings are externally connected by a variable rheostat (resistance is varied in order to give it proper starting and running current).
∙ So more the resistance, more the torque. When we add resistance to the rotor the torque is high, slip is high and the current is reduced. ∙ Starting torque Tst ∝ E x I x R/Z
Q . At standstill condition the value of slip is
1. 0
2. Infinity
3. One
4. None of the above
Answer 3. One Explanation:
Explanation:
At standstill rotor, conductors are being cut by rotating flux wave at synchronous speed ns.
S = ns -nr/ns
At standstill the rotor speed is zero, therefore
S = ns -0/ns
S = 1
Q . The condition for maximum running torque is
1. R= S × X/2
2. R = X/2
3. R =X × S
4. R =X
Answer 3. R =X*S Explanation:
Explanation:
∙ The induced torque is maximum when rotor resistance per phase is equal to the slip times the rotor reactance per phase under running condition. i.e R = S × X
∙ Note: Maximum torque is inversely proportional to the standstill reactance of the motor therefore to achieve maximum torque X, and therefore inductance of the rotor should be kept as small as possible.
Q . The condition for maximum starting torque is
1. R = S × X/2
2. R = X/2
3. R = X × S
4. R = X
Answer 4. R= X
Explanation:
Since at starting period S = 1 therefore condition of maximum starting torque of an induction motor is that when the rotor resistance is equal to the standstill reactance. i.e. R= X .
Q . In which of the following reason induction motor operation is stable? 1. Low Slip region
2. High slip region
3. Any of the two
4. None of the above
Answer 1. Low slip region
Explanation:
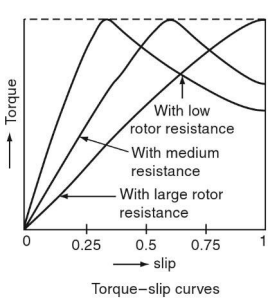
For constant supply voltage Torque is given as

Low Slip Region of an induction Motor
∙ For Low slip region “S” is very small therefore the term S.X2 can be neglected and R2 is constant therefore
T ∝ S
∙ Hence in low slip region torque is directly proportional to the slip. ∙ So as the load increases speed decreases therefore to satisfy the load demand torque increases thereby increase in the slip.
∙ Hence the graph is in the straight line in nature and this reason is a stable region.
High Slip Region of an induction Motor
∙ For high slip region slip value approaches to 1 hence the value of R2 is very small and can be neglected and the X2 is constant, therefore

T ∝ 1/S
∙ Hence in high slip region torque is inversely proportional to the slip. ∙ Now when the load demand increases speed decreases. As speed decreases slip increases, therefore, torque decreases.
∙ But torque must increase to satisfy the newly increased load demand. ∙ As torque decreases due to extra loading effect its speed further decrease and slip further increases
∙ Hence same load act as an extra load due to the decrease in the torque produced therefore the speed will keep on decreasing and at last, the motor comes to standstill condition.
∙ Hence this reason is called an unstable region.
Q . Rotor resistance speed control method is not applicable in 1. Slip Ring induction motor
2. Squirrel cage induction motor
3. Synchronous motor
4. None of the above
Answer 2. Squirrel cage induction motor
Explanation:
∙ In squirrel cage motor there is no provision made for adding external resistance because the end rings are permanently shorted with the rotor conductor, therefore, the starting torque of squirrel cage induction motor is very poor due to low rotor resistance.
∙ Therefore the rotor resistance speed control method is not applicable in squirrel cage induction motor.
Q . As compared to DOL starting method the star delta starting method should have
1. High torque
2. Low starting current
3. High starting current
4. Smooth acceleration
Answer 2. Low starting current
Explanation:
∙ The direct online starting method is used for small motor up to 5 HP. ∙ The main purpose of any starter is to reduce the requirement of high starting current.
∙ Star delta operation means, first the motor will run in star after that when the motor is near to full speed then delta operation will be initiated.
∙ If the motor is started with star connection the phase voltage gets divided by √3 times i.e (phase voltage= line voltage/√3). since the voltage is reduced, the starting current is also reduced.
∙ Once the motor reaches the rated speed, the connection will be changed to the delta, but now the motor will not draw much current like at the time of starting.
∙ Note: Since the Torque is Proportional to Square of voltage. A high starting torque is not possible in the star-delta starting method.
Q For starting of an induction motor, star/delta starting can be considered equivalent to an autotransformer starter with the ratio of
1. 33.3%
2. 50%
3. 100%
4. 57.7%
Answer 4. 57.7%
Explanation:
∙ The starting current of an induction motor is directly proportional to the applied voltage per phase to the motor.
∙ If low voltage will be applied to an induction motor than the starting current will be also low, lower starting current means lower starting torque.
∙ The best method to reduce the voltage starting is achieved by means of a star-delta starter.
∙ In this method, the motor windings are connected in star configuration during the starting period and then switched over to delta when the motor picks up the speed.
∙ By connecting the motor in the star configuration the reduction of voltage is 1/√3 = 0.577, therefore, the starting current also gets reduced to 0.577.
Q . An induction motor is analogous to
1. Auto-transformer
2. Two windings transformer with secondary short circuited 3. Two windings transformer with secondary open circuited 4. Synchronous motor
Answer.2 Two windings transformer with secondary short-circuited Explanation:
1. Analysis of transformer model is very easy to visualize then induction motor so, the induction motor is generalized as transformer because of following reasons :
1. Operations of both induction motor and transformer are somewhat same that is “both operate on the same principle of induction”.
2. Both have two windings
∙ Transformer: primary and secondary
∙ Induction motor: Stator and rotor
∙ Rotor windings are short-circuited at the end to produce torque for the rotation.
3. Voltage ratios of two windings in both the cases are of similar kind ∙ Transformer: 1:n where ‘n’ is voltage transfer ratio
∙ Induction motor: 1:s where ‘s’ is slip(also voltage ratio) 4. Both have the core in between two windings :
∙ Transformer: Ferromagnetic material
∙ Induction Motor: Air gap
Because of above reasons Induction motor is called as two windings transformer with secondary short-circuited.
Q . A 4 pole 50 Hz induction motor is running at 1300 rpm. Find the speed of stator magnetic field with respect to the rotor?
1. 1500 rpm
2. 200 rpm
3. 1300 rpm
4. 3000 rpm
Answer 2. 200
Explanation:
∙ The relative speed of an induction motor stator magnetic field with respect to rotor is given as
Ns – Nr
∙ Ns = 120f/p
=120 x 50 / 4
=1500
∙ Hence speed of stator magnetic field with respect to rotor is 1500-1300 = 200 rpm
Q . No load test of 3-phase induction motor used to determine 1. Variable loss
2. Constant loss
3. Eddy current loss only
4. Hysteresis loss only
Answer 2. Constant loss
Explanation:
No load test or open-circuit test
∙ This test is similar to the open circuit test of a transformer.
∙ The motor is uncoupled from its load and the rated voltage and frequency is applied to the stator.
∙ Since the motor runs at no load, the total input power is equal to constant iron-loss, friction loss, and windage losses of the motor.
Q . Blocked rotor test in an induction motor is used to determine 1. Leakage impedance
2. Copper loss
3. Both 1 & 2
4. None of the above
Answer 1.Both 1 & 2
Explanation:
∙ In blocked rotor test, the induction motor is locked so it can’t be moved therefore rotor will draw more current from supply because of the load demand on it. Hence the current will keep on increasing.
∙ The voltage applied on the stator to perform blocked rotor test is low therefore the flux is very small. hence the stator core loss is neglected. ∙ In squirrel cage induction motor the rotor windings are permanently short-circuited while in slip ring induction motor the rotor windings are short-circuited by slip rings.
∙ Copper losses occur due to the current flowing in the rotor and stator windings.
∙ Therefore blocked rotor test is used to determine copper losses and leakage impedance.
Q . Which of the following losses are negligible in blocked rotor test? 1. Mechanical losses
2. Iron losses
3. Both 1 & 2
4. None of the above
Answer 3. Both 1 & 2.
Explanation:
∙ Since the rotor is locked in blocked rotor test, therefore, the mechanical loss is negligible.
∙ The voltage applied on the stator to perform blocked rotor test is low since the high voltage can damage the stator winding, therefore, it has negligible iron losses.
Q . In induction generator operation the slip is always
1. Positive
2. Negative
3. Infinite
4. Zero
Answer 2. Negative
Explanation:
∙ In generator operation, a prime mover (turbine or engine) drives the rotor above the synchronous speed therefore for generator Nr >> Ns
S = Ns – Nr/Ns
∙ Therefore slip is negative in induction generator.
Q . The rotor power output of a 3-phase induction motor is 30 KW and corresponding slip is 4%. The rotor copper loss will be
1. 625 Watt
2. 250 Watt
3. 1000 Watt
4. 1250 Watt
Answer 4. 1250 watt
Explanation:
Rotor copper losses = rotor input- rotor output
and rotor output power = (1-s) rotor input power
∴ rotor Input power = output/(1 – s)
= 30000 /1 – 0.04 = 31250
Rotor copper losses = 31250 -30000 = 1250 watt
Q . In an induction motor if the air gap is increased than which of the following statement is correct
1. Power factor will decrease
2. Power factor will increase
3. Speed will increase
4. Speed will decrease
:Answer 1. Power factor will decrease
Explanation:
∙ If the air gap is increased, it will offer high resistance to magnetic flux and the stator will draw more magnetizing current from the supply to maintain the required flux in the air gap to the rotor. This will reduce the power factor of an induction motor or any other electrical motor.
Q . If the applied rated voltage per phase is reduced to one-half, then the starting torque of squirrel cage induction motor becomes
1. 4 times the initial value
2. 2 times the initial value
3. 1/4 of the initial value
4. 1/2 times the initial value
Answer 3. 1/4 of the initial value
Explanation:
In an induction, motor torque is proportional to square of the applied voltage T ∝ V2
T = (V/2)2
T = 1/4 x V2
⇒ 1/4 of the initial value
Q . The value of power factor of an induction motor operating at no load is 1. 0.9 lagging
2. Unity
3. 0.2 lead
4. 0.2 lag
Answer 4. 0.2 lag
Explanation:
∙ The power factor of the motor depends on the loading of the motor, fully loaded motors operate at high PF while it is as low as 0.2 lag at no load. ∙ Motor operating at low power factor draw high current and this increase copper losses (I2R losses) because at no-load most of the power goes to fixed losses i.e armature loss and windage loss, giving very small useful watt component.
Q . Induction motors have the advantage of
1. Less Maintenace
2. Less cost
3. Simple in construction
4. All of the above
Answer 4. All of the above Explanation:
Explanation:
Advantages of an induction motor ∙ High efficiency and good power factor.
∙ Reliable and low cost
∙ Simple and rugged (almost unbreakable) construction
∙ minimum maintenance
Q . A small air gap in 3 phase induction motor helps to
1. Reduce cogging effect
2. Reduce Crawling effect
3. Reduce Magnetizing effect
4. All of the above
Answer 3. Reduce Magnetizing effect
Explanation:
If the air gap of an induction motor is increased then
∙ The magnetic flux in the air gap will decrease and leakage flux will increase. This will cause the reduction in the maximum available torque. ∙ The magnetizing current will increase. This will cause a poor power factor.
∙ Therefore small air gap will increase the magnetizing current which will produce the required uniform flux.
Q . what is the ratio of rotor input power to rotor copper loss in an induction motor?
1. 1/(1 – S)
2. 1 – S
3. 1/S
4. S
Answer 3. 1/S
Explanation:
∙ Rotor copper loss = S × Rotor input power
∴ Rotor input / Rotor copper loss = 1/S.
Q . The rotor slots are slightly skewed in squirrel cage induction motor in order to
1. Increasing Rotor bar strength
2. Prevent cogging effect
3. Both 1 & 2
4. None of the above
Answer 2. Prevent cogging effect
Explanation:
∙ Rotor bars are skewed to prevent cogging effect.
∙ When an induction motor refuses to start even if full voltage is applied to it, this is called as cogging.
∙ Starting torque of an induction motor depends on the product of the magnitude of stator and rotor current and sine of the angle between both.
∙ If the conductors remain linear, the angle between stator and rotor current will be 180 degrees. As sin(180)=0, the starting resultant torque will be zero and thus motor will fail to start. This phenomenon is called cogging.
∙ Skewing makes the rotor conductor longer with the reduced cross area. This increases the rotor conductor resistance hence starting performance and the torque of an induction motor is improved.
Q . If an induction machine is run at above the synchronous speed it acts as 1. Synchronous Motor
2. Synchronous Generator
3. Induction Generator
4. None of the above
Answer 3. Induction Generator
Explanation:
∙ In generator operation, a prime mover (turbine or engine) drives the rotor above the synchronous speed therefore for generator
Nr >> Ns
S = Ns – Nr/Ns
∙ Therefore slip is negative in induction generator.
Q . The best method to increase the starting torque of a 3-phase slip ring induction motor is
1. Rotor Resistance
2. Supply voltage
3. Supply Frequency
4. None of the above
Answer 1. Rotor resistance
Explanation:
∙ The rated voltage can’t be applied at the time of starting because the rotor is stationary and it will induce high voltage which can damage the
windings of the motor.The motor will draw the 5- 10 times the rated current.
∙ Therefore induction motor can’t be started with rated voltage to get high starting torque.
∙ In slip ring induction motor there is a provision for adding external resistance as the rotor winding is not short circuited. Since starting torque is also proportional to rotor resistance (Tst∝R.) this resistance helps increasing starting torque.
∙ The external resistance also limits the starting current drawn by the motor at the
time of starting
∙ The Resistance will get disconnected once after the load attains the motion.
Q . If the frequency of 3-phase supply to the stator of a 3-phase induction motor is increased, then synchronous speed
1. Increased✓
2. Decreased
3. Remain unchanged
4. None of the above
Explanation
Synchronous speed of the 3 phase induction motor is
Ns = 120f/P
From the above equation, it is clear that the synchronous speed is directly proportional to the applied frequency. i.e
Ns ∝ F
Hence by increasing the frequency, the synchronous speed of the 3 phase induction motor can be increased.
Q . A 3 phase induction motor is essentially a
1. Constant speed motor✓
2. Variable speed motor
3. Very costly
4. easily maintainable
Hide Explanation
The induction motor is not a perfectly constant speed motor. At no load, the rotor lags behind the stator flux only a small amount since the only torque required is that needed to overcome small no-load losses. Hence it rotates at almost the synchronous speed (120 f/P rpm).
As load increases, it needs to generate torque to drive the load.As the mechanical load is added the rotor speed decreases. A decrease in rotor speed allows the constant speed rotating field to sweep across the rotor conductors at a faster rate, thereby inducing larger rotor current (since rotor
impedance is low). This results in a large increase in torque which tends to bring the speed to the original value.
Although the motor speed does decrees slightly with increased load. Normally, maximum torque is produced at 5% slip, i.e. 95% of synchronous speed.The speed regulation of the induction motor is very close to the synchronous speed thus we can say that an induction motor is a nearly constant speed motor.
Q . If there are no copper losses in the rotor, then
1. Rotor will not run
2. Rotor will run at a very low speed
3. Rotor will run at a very high speed
4. Rotor will run at synchronous speed✓
Explanation
Rotor gross output = Rotor Input − Rotor copper loss ————- 1 Where Rotor output = Tg × 2πN/60
Rotor Input = Tg × 2πNs/60
Where Tg = Gross torque
Ns = Synchronous Speed
N = Rotor speed
When there is no copper loss then from equation 1
Rotor output = Rotor Input
Tg × 2πN/60 = Tg × 2πNs/60
N = Ns
Hence if there are no copper losses in the rotor, then rotor output will become equal to rotor input and the rotor will run at synchronous speed.
Qu 53. When the rotor of three phase induction motor is blocked then the slip is
1. 0
2. 0.5
3. 0.1
4. 1✓
Explanation
Since the rotor is blocked therefore it can’t rotate hence rotating speed Nr = 0 Slip of an induction motor is given as
s = (Ns – Nr)/Ns
s = (Ns – 0)/ Ns = Ns/Ns
s = 1
Q . The full load slip of an induction motor varies from
1. 10 – 20%
2. 100%
3. 50%
4. 2 – 7%✓
Explanation
“As explained in Question 52.,” An induction motor can be termed as a constant speed motor and the constant speed can only be achieved if the rotor speed is closed to the synchronous speed. Therefore a general-purpose induction motor is designed to operate in the low slip at full load in order to have good running performance. Depending on the rating, full load slip varies from 2 to 1%. Such a motor has high starting current (5-8 times) and low starting torque whereas for high HP motor, the slip varies from 3 – 7%.
Q . An 8 pole, three phase induction motor is supplied from 50 Hz, a.c. supply. On full load, the frequency of induced EMF in the rotor is 2 Hz. Then the full load slip and the corresponding speed.
1. 4% & 750
2. 4% & 720✓
3. 5% & 1000
4. 5% & 1500
Explanation
Given value
P = 8 pole
F = 50 Hz
Fr = 2 Hz
Rotor frequency is given as
Fr = sf
s = 2/50
s = 0.04
%s = 0.04 x 100 = 4% ——-full load slip
Now the corresponding speed i.e rotor speed
N = Ns(1 – s)
Where Ns = 120f/P = 120 x 50/8 = 750 R.P.M
N = 750(1 – 0.04)
N = 720 R.P.M
Q . A 4 pole, 3 phase, 50 Hz induction motor runs at a speed of 1470 r.p.m. speed. Then the frequency of the induced e.m.f. in the rotor under this condition.
1. 1 Hz✓
2. 2 Hz
3. 5 Hz
4. 6 Hz
Explanation
Given
P = 4
f = 50 Hz
N = 1470 RPM
Ns = 120f/P = 120 x 50/4 = 1500 RPM
Slip of an induction motor
s = (Ns – Nr)/Ns
= (1500 – 1470)/1500 = 0.02
Now Rotor frequency fr
fr = sf = 0.02 x 50 = 1 Hz
Q . The direction of rotation of 3-Φ induction motor is clockwise when it is supplied with the 3-Φ sinusoidal voltage having phase sequence of A-B-C. For counterclockwise rotation, the phase sequence of the power supply should be
1. B-C-A
2. A-C-B✓
3. C-A-B
4. Any of the above
Explanation
The direction of rotation of a 3 phase induction motor can be reversed by interchanging any two of the three motor supply lines.
The phase sequence of the three-phase voltage applied to the stator winding is A-B-C. If this sequence is changed to A-C-B, it is observed that direction of rotation of the field is reversed i.e., the field rotates counterclockwise rather than clockwise. However, the number of poles and the speed at which the magnetic field rotates remain unchanged.
Q . The rotor winding of a 3-phase wound rotor induction motor is generally …………. connected.
1. Delta
2. Star✓
3. Partially Delta & Partially Star
4. None of the above
Explanation
The stator can be either star or delta. Many motors have a winding scheme and coils with six connections that allow the windings to be connected in either star or delta. The rotor of a squirrel-cage induction motor has the number of rotor bars connected at both ends. That is essentially a delta connection because it is the only way the rotor bars can be connected to form a closed circuit. On the other hand, a wound rotor always has a star connection because that allows the external connection of resistors in series with the windings.
The advantages of Star connection is as follows
1. The phase voltages in star connection are 57.7 % of the line voltages, i.e. the armature winding in star connection is less exposed to voltage as compared to the delta connection which in turn prove more economic
if we consider insulation, breakdown strength, the requirement of conductor material etc.
2. Availability of neutral in the star connection, if the neutral is grounded then it also provides a path for the Zero-Sequence currents during faults, whereas in the delta connection the zero sequence currents flow within the delta circuit and hence increasing the load on the winding.
3. Star connection reduces the number of slip rings required to connect the external resistance to the rotor of the induction motor.With star connection, only 3 slip rings are required.Whereas in delta connected rotor 6 slip rings are required (2 for each phase).
4. Vline= √3 Vph or Vph=Vline/√3 in star connected
i.e. Vph is Reduced to √3 times the line voltage in a star connected system
Now Voltage is related to insulation, and insulation is related to cost i.e higher the voltage, higher the insulation and higher the cost. Since as told Vph in a star is less, so the insulation in the conductor is less and hence the cost is reduced.
5. In star connection, additional external resistance may be inserted in the rotor circuit at starting to increase the starting torque and decrease the starting current. As the motor gains speed, these external resistances are cut out of the rotor circuit.
Ques 59. An eight-pole wound rotor induction motor operating on 60 Hz supply is driven at 1800 rpm by a prime mover in the opposite direction of revolving magnetic field. The frequency of rotor current is
1. 120 Hz
2. 180 Hz✓
3. 60 Hz
4. 200 Hz
Explanation
The speed of induction motor is
N = 120f/P
f = PN/120
f = (8 x 1800)/120
= 120
Frequency of rotor current is
f’ = f + 60 = 120 + 60
F’ = 180
Q . In a wound rotor motor, the rotor winding is wound for poles …………. that of the stator winding.
1. Equal to✓
2. Greater than
3. Smaller than
4. None of the above
Explanation
If the motor is squirrel cage induction motor, the number of rotor poles automatically gets adjusted to the number of stator poles and we have nothing to explain in that case.
But if the motor is wound rotor induction motor and number of poles on rotor and stator don’t match, there will be no rotor torque. Here’s how (Given you have knowledge of working of IM)
∙ Let’s take a motor with rotor wound for 2 poles and stator wound for 4 poles.
∙ Now see the picture
∙ As you can see, when the stator magnetic field rotates at synchronous speed, there will be no magnetic locking between stator magnetic field and rotor magnetic field.
∙ Thus the torque developed in this case is zero and motor will fail to start.
Q . The maximum EMF is induced in the rotor of a 3-phase induction motor when it
1. No-Load
2. Full-load
3. Half-load
4. is blocked✓
Explanation
∙ When the Rotor is blocked or during starting the Rotor speed is zero (N = 0) and slip is equal to unity i.e s = 1.
∙ Hence stationary rotor has maximum relative motion with respect to Rotating magnetic Field R.M.F.
∙ Therefore the maximum e.m.f. gets induced in the rotor at the start. The frequency of this induced e.m.f. at the start is same as that of supply frequency.
∙ As the motor starts rotating with speed N, the relative speed of rotor with respect R.M.F.
decreases and becomes equal to slip speed of NS – N.
∙ The induced e.m.f. in rotor depends on the rate of cutting flux i.e. relative speed NS – N. Hence in running condition magnitude of induced e.m.f. decreases so as its frequency.
Q . From the above question find the total mechanical power developed by the Rotor
1. 30.28 kW
2. 29.26 kW✓
3. 25.2 kW
4. 14.45 kW
Explanation
Mechanical power developed by the rotor = Rotor input power – Rotor losses = 30.8 – 1.54 = 29.26 kW
Q . Find the output power of the motor if friction and windage losses are 175 Watts
1. 29.26 kW
2. 28.51 kW✓
3. 30.43 kW
4. 14.56 kW
Explanation
Output power of the motor = Power developed by the rotor – Friction and windage losses
= 29.26 – 0.75 = 28.51 kW
Q . The reactance of the rotor circuit of a 3-phase induction motor is maximum at
1. Full load
2. Half Load
3. Half Full load
4. Starting✓
Explanation
Rotor reactance at running condition is given as
X2r = sX2
Where X2r = Rotor reactance at running condition
X2 = Rotor reactance at standstill
At starting when slip is equal to 1 i.e s = 1 rotor reactance at running condition is equal to rotor reactance at starting condition hence rotor reactance will be maximum under starting conditions.
Note:- The resistance is independent of frequency remains same at standstill and in running condition. While the rotor reactance decreases by slip times the rotor reactance at standstill.
Q . A 3 phase, 400-V, 50 Hz 4 pole induction motor is fed from a 3-phase supply and runs of 1425 rpm. The frequency of the rotor emf is 1. 2.5 Hz✓
2. 50 Hz
3. 48 Hz
4. Zero
Explanation
Synchronous speed
Ns = 120f/P
= 120 x 50/ 4
= 1500 rpm
Rotor speed = 1425 rpm
Slip = (Ns – Nr)/Ns
= (1500 – 1425)/1500
= 0.05
∴ Frequency of rotor emf
= 0.05 x 50
= 2.5 Hz
Q . If the stator voltage of a squirrel cage induction motor is reduced to 50 percent of its rated value, the torque developed is reduced by how many percentages of its full load value?
1. 50%
2. 25%
3. 75%✓
4. 57.7%
Explanation
Squirrel cage induction motor has very rugged construction, the three-phase squirrel-cage motor is capable of handling the starting current without any damage to winding. However very large motors may cause line drops, which may affect other equipment operating from the same system For such installations, reduced voltage starters a used. The reduced voltage limits the starting current to a lower value.
Starting squirrel cage induction motor under reduced voltage may be reduced the starting voltage considerably. From the torque equation of a three-phase induction motor, the starting torque is approximately proportional to the square of the applied voltage i.e T ∝ V2
By reducing the voltage by 50% ( reducing voltage by 1/2) than T = (1/2)2
T = 1/4 = 25%
Hence by reducing the voltage by 50%, the torque is reduced to 25% and 75% of full load value.
Q . At no-load, the Iron loss of a 3-phase induction motor is 1. Practically Zero✓
2. Large
3. Small
4. None of the above
Explanation
As there is no load on induction motor, the rotor runs at a speed close to synchronous speed. Synchronous speed is the speed of the rotating magnetic field. Remember that the rotor speed is close to synchronous speed but never equal to it according to Lenz law. So when the rotor runs very close to synchronous speed, the slip is very small approximately equal to zero. The frequency of rotor in running condition is given as sf. So rotor frequency is very very small. Since iron losses depend on the square of the frequency so they are almost negligible and therefore not considered.
Q . For higher efficiency of 3-phase induction motor, the slip should be 1. Unity
2. Large
3. As small as possible✓
4. Very large
Explanation
An induction motor can be termed as a constant speed motor and the constant speed can only be achieved if the rotor speed is closed to the synchronous speed. Therefore a general-purpose induction motor is designed to operate in the low slip at full load in order to have good running performance. Depending on the rating, full load slip varies from 2 to 1%. Such a motor has high starting current (5-8 times) and low starting torque whereas, for high HP motor, the slip varies from 3-7%
Approximate efficiency of induction motor = (1 − s)
So it is clear that for the higher efficiency of 3 phase induction motor the slip should be as small as possible.
Q . A 3-phase induction motor is running at 2% slip. If the input to rotor is 1000 W, then mechanical power developed by the motor is
1. 500 W
2. 200 W
3. 20 W
4. 980 W✓
Explanation
Mechanical power developed in 3-phase motor = (1 − s) × power input to rotor = (1 – 0.02) x 1000 = 980 W
Q . The approximate efficiency of a 3-phase, 50 Hz, 4-pole induction motor running at 1350 r.p.m. is
1. 90%✓
2. 60%
3. 45%
4. 100%
Explanation
Given
P = 4
f = 50 Hz
N = 1350 RPM
Ns = 120f/P = 120 × 50/4 = 1500 RPM
Slip s = (Ns – N)/Ns
= (1500 – 1350)/1500 = 0.1
Approximate efficiency of Induction motor = (1 – s)
1 – 0.1 = 0.9 = 90%
Q . If the air gap between the rotor and stator of a 3-phase induction motor is increased, then
1. No-load current is increased
2. Leakage reactance is decreased
3. Leakage reactance is increased✓
4. Any of the above
Explanation
If the air gap of an induction motor is increased, the following will happen: ∙ The permeability of the magnetic circuit rotor-to-stator will decrease. ∙ The magnetizing inductance of the motor thus decreases. ∙ The magnetizing current will increase. This will cause a poorer power factor at all loads.
∙ The magnetic flux in the air gap will decrease and leakage fluxes will increase. This will cause a reduction in the maximum available torque. In summary, the maximum available torque will decrease, the power factor will worsen and the motor will run with increased slip.
So it is always good performance-wise to run with as small an air gap as possible, which will reverse all of these effects. But if the air gap is too small, rotor cooling is compromised, and if the rotor expands through overheating (e.g. by exceeding the recommended maximum number of starts per hour) the rotor can “pole” by rubbing or jamming with the stator.
Q . The conditions of an induction motor at no-load resemble those of a transformer whose secondary is
1. Short-circuited
2. Open-circuited✓
3. Supplying a variable resistive load
4. None of the above
Explanation
An Induction motor can resemble as a transformer.
∙ In a transformer, the AC voltage is supplied to the primary winding. This voltage produces current in the primary winding which sets up flux Φ in the iron core. This flux links both the primary and the secondary winding. As the flux is alternating in nature, an emf is induced in the secondary winding. Hence, there is no electrical connection between the primary and secondary windings of a transformer. The secondary windings receive energy from the primary by electromagnetic induction.
∙ Similarly, in an induction motor, the three-phase ac supply is given to the stator winding which sets up a rotating magnetic field. This rotating magnetic field induces emf in the rotor conductors. Hence, the rotor receives energy from the stator by electromagnetic induction.
∙ The primary and secondary winding of a transformer resembles the stator and rotor winding of an induction motor. The resistance and leakage reactance of the stator and rotor winding of an induction motor is similar to the primary and secondary winding of a transformer.
∙ The operation of an induction motor under the no-load condition is similar to a transformer under open circuit condition. Similarly, a three-phase induction motor with its rotor blocked behaves similarly to a transformer under short circuit conditions.
∙ The equation for the EMFs induced in the primary and secondary windings of a transformer is similar to that of the EMFs induced in the stator and rotor winding of an induction motor.
Q . The speed of a squirrel cage induction motor is changed by 1. Cascade Connection
2. Rheostatic control
3. Pole changing method✓
4. Any of the above
Explanation
∙ The pole changing method is used in squirrel cage IM because like slip ring IM we can’t add external resistance in the rotor to reduce speed. ∙ In this method, it is possible to have one or two speeds by changing the
number of poles. This is possible by changing the connection of the stator winding with the help of simple switching.
Q . The starting torque of a 3-phase induction motor is ………… supply voltage.
1. Independent of
2. Directly proportional
3. Directly proportional to square✓
4. Inversely proportional
Ques 82. The starting torque of an induction motor is maximum when rotor resistance per phase is …………… rotor reactance/phase. 1. Equal to✓
2. Less than
3. More than
4. None of the above
Maximum starting torque is obtained when the slip is equal to the ratio between the rotor resistance (R2) and the rotor inductive reactance (X2). This slip is also known as slip at maximum torque, labelled as Sm.
Q . The maximum torque of a 3-phase induction motor under running conditions is
1. Inversely proportional to the Rotor reactance at standstill✓ 2. Inversely proportional to the supply voltage
3. Directly proportional to the Resistance
4. None of the above
Q . If the supply voltage of a 3-phase induction motor is increased two times, then, torque is
1. Increased 4 times✓
2. Decreased 4 Times
3. Increased twice
4. Remain the same
Explanation
As stated in question Number 81 the torque of the induction motor is directly proportional to the square of the voltage
T ∝ V2
If the supply voltage is increased by two times then the torque will increase four times
T = 22 or T = 4
Q . The 3-phase induction motor is so designed that the rotor should have ……….. under running conditions.
1. High resistance
2. Low resistance✓
3. Large slip
4. High reactance
Explanation
The resistance in the rotor circuit greatly influences the performance of an induction motor. A low rotor resistance is required for normal operation when running so that the slip is low and the efficiency high. However, a higher motor resistance is required for starting so that the starting torque and power factor are high and the starting current is low.
Q . If a 3-phase induction motor is running at slip s, then, rotor copper loss is equal to.
1. (1 – s) × Rotor Input
2. (1 + s) × Rotor input
3. s × Rotor input✓
4. s × stator input
Explanation
The Rotor copper loss is slip time the rotor Frequency i.e
Rotor copper loss = s × Rotor input
Note:- The derivation of Rotor copper loss will be explained in the theoretical section
Q . If an induction motor is running at slip s, then rotor output is 1. (1 – s) × Rotor input✓
2. (1 + s) × Rotor input
3. s × Rotor input
4. None of the above
Explanation
The gross mechanical power developed or the rotor output is (1 – s) times the rotor input
Mechanical power = Rotor input – Rotor copper loss
Now rotor copper loss = s × Rotor input
Putting the value of Rotor copper loss
Mechanical power = Rotor Input – s × Rotor input
Mechanical power = Rotor Input (1 − s)
Q . A 3 phase induction motor has the facility for pole changing from 4 to 6. When it is operating as a 4 pole machine on 440V, 50Hz balanced 3 Phase supply, the frequency of rotor current is 3Hz. Then the speed of the motor is 1. 1500 RPM
2. 1200 RPM
3. 1360 RPM
4. 1410 RPM✓
Explanation
Synchronous machine of 4 pole machine is
Ns = 120f/p = 120×50/4 = 1500 RPM
Since Rotor frequency is slip times the stator frequency
fr = sfs
or s = fr/fs
= 3/50 = 0.06
Rotor Speed Nr = (1 – s) Ns
Nr = (1 – 0.06)1500
Nr = 1410 RPM
Q . If the motor were to run at 65% speed as in ‘the given above question, but operate as a 6 pole machine, what will be the slip and frequency of the rotor currents?
1. 4.175 Hz✓
2. 3.286 Hz
3. 2.458 Hz
4. 1.432 Hz
Explanation
Synchronous speed of the 6 pole machine
Ns = 120f/p = 120×50/6 = 1000 Hz
Nr2 = Rotor speed of 6 pole machine
= 0.65 × 1410 = 916.5 RPM
Slip s = (Ns2 – Nr2)/Ns2
s = (1000 – 916.5)/1000
= 0.0835
Rotor frequency fr = sfs
= 0.0835 x 50 = 4.175 Hz
Q . For a slip of 0.05, find the ratio of rotor speeds with the motor operating with 4 and 6 poles respectively.
1. 2.8
2. 1.5✓
3. 3.2
4. 4.5
Explanation
Rotor speed with 4 poles with slip 0.05
= (1 – 0.05)×1500
= 1425 RPM
Rotor speed with 6 poles with slip 0.05
= (1 – 0.05)1000
= 950 RPM
The Ratio of rotor speeds with the motor operating with 4 and 6 poles Nr4/Nr6 = 1425/950 = 1.5
Download Link - Click Here




0 Comments